
電動アクチュエータのメリット
空気圧式バルブに比べて 電動式バルブは、設備費用1/5*1 消費電力1/10*1 に抑えます。
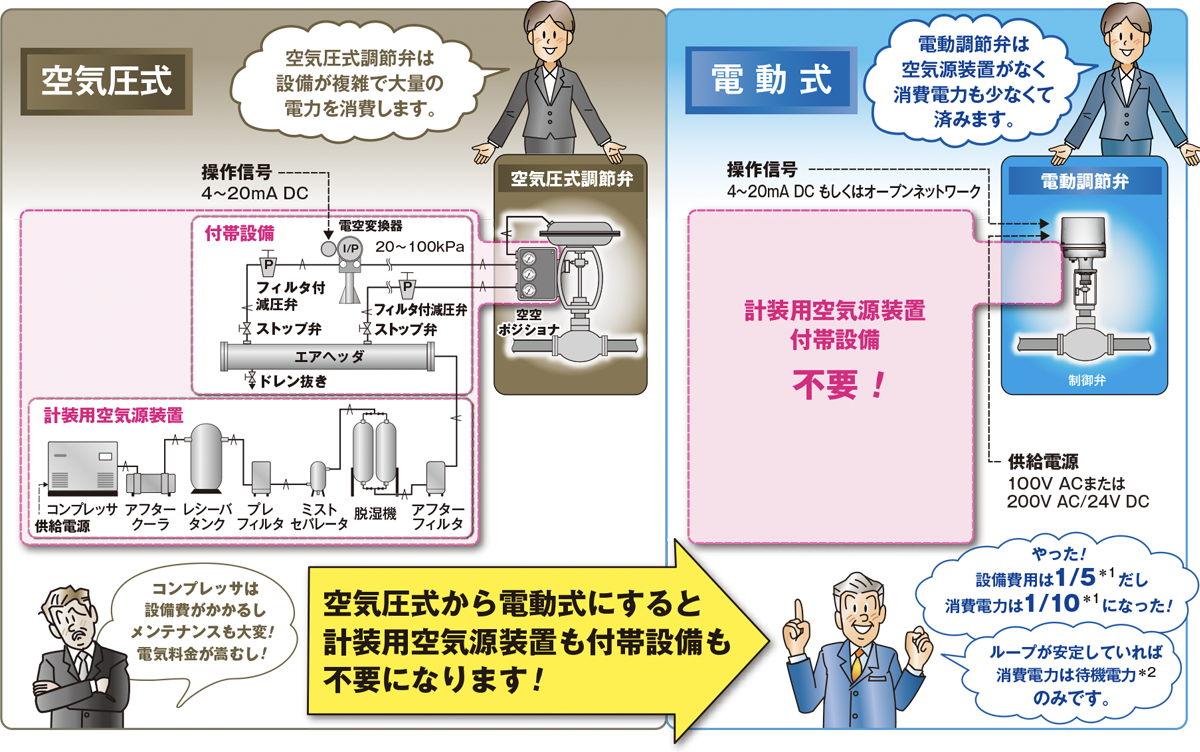
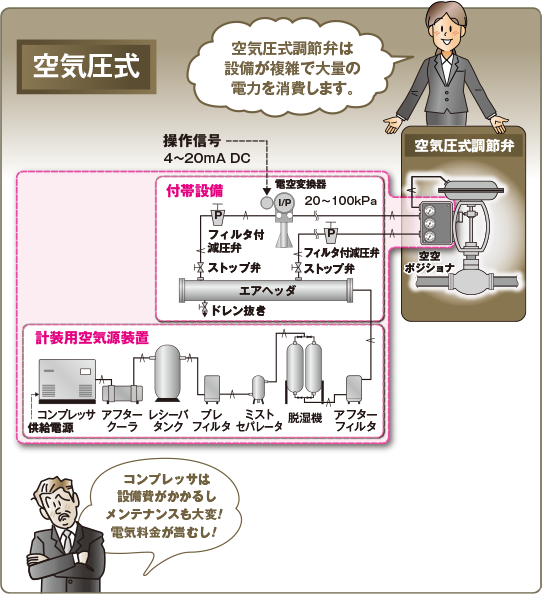
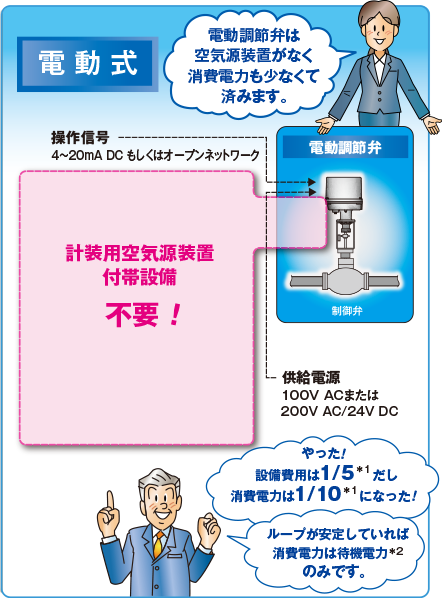
*1. 当社調べ。
*2. 最大消費電力:240VA 待機電力:20VA
この数値は当社製サーボトップ®2(形式:PSN1)を使用した場合です。
高精度高分解能を実現するメカニズム
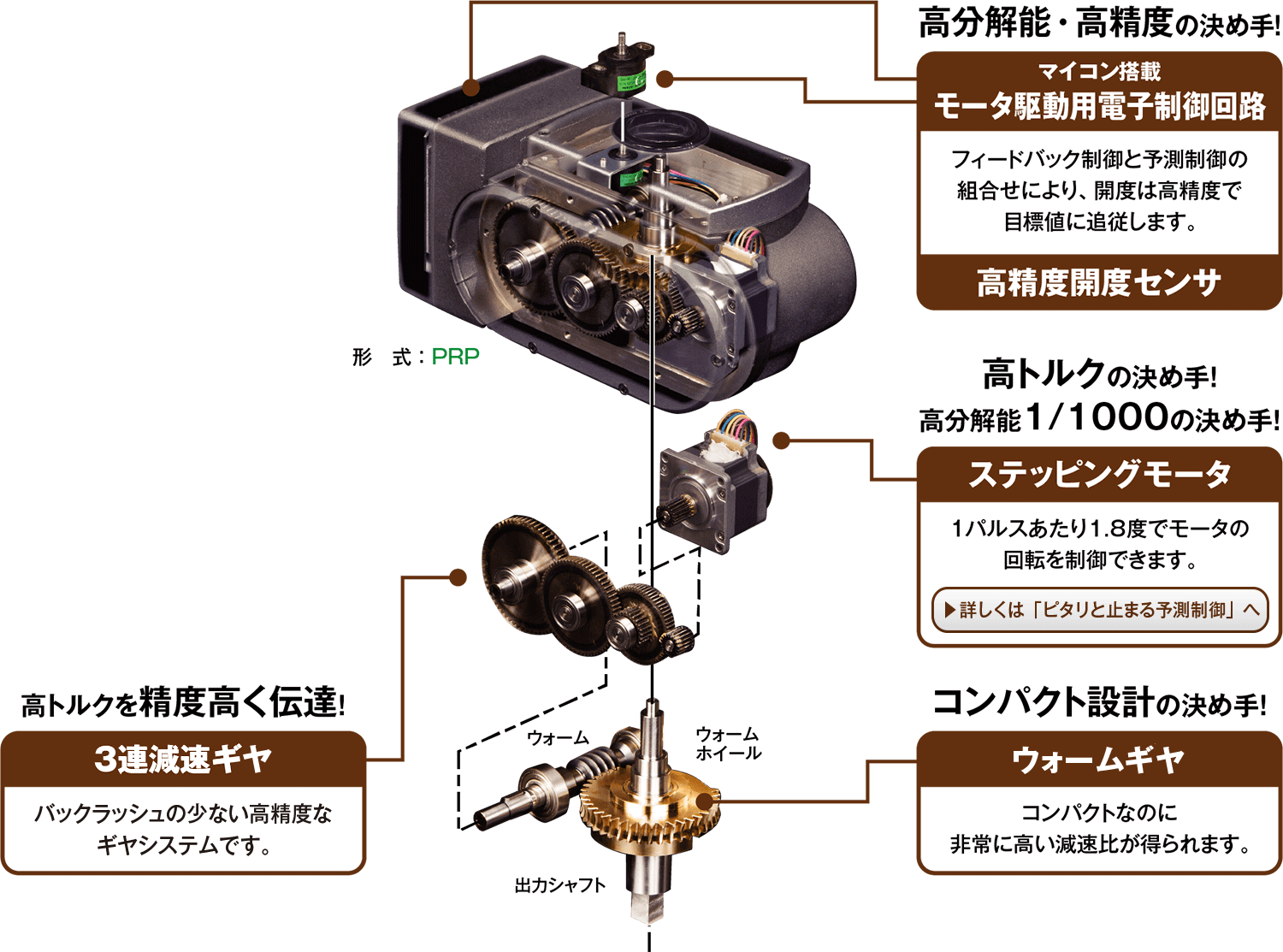
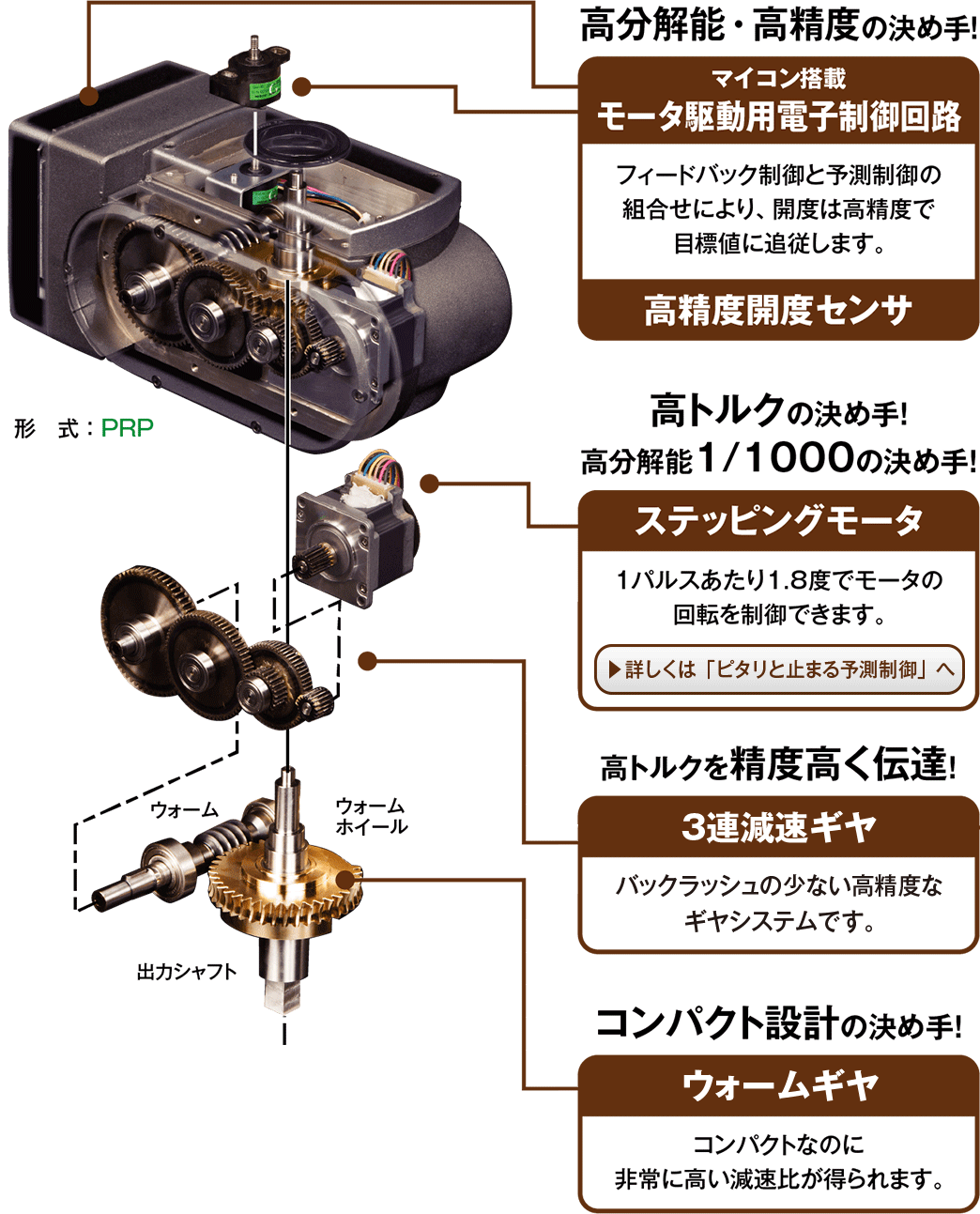
ステッピングモータの特長
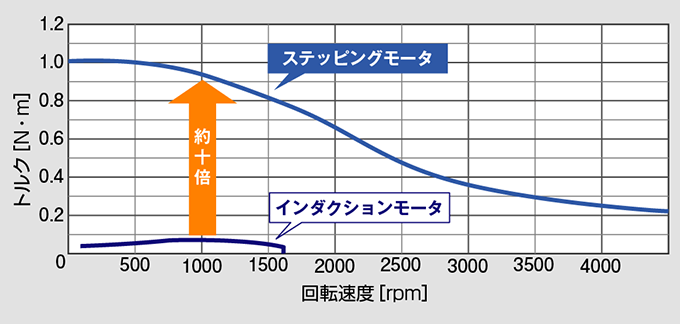
インダクションモータとの比較
ステッピングモータは、インダクションモータと比較して下記にあげるような多くの利点があり、調節弁をはじめとする小型機構部のアクチュエータに最適な駆動源です。
- 単位面積あたりのトルクが大きい(インダクションモータの約10倍)。
- 起動トルクが大きく、かつ回転の上昇に伴うトルク変動が少ない。
- 回転速度が可変できる(インダクションモータはできない)。
- 回転速度は負荷変動の影響を受けない。
- 加減速制御により高精度な位置決め制御ができる。
- 供給電源の電圧や周波数の影響を受けない。
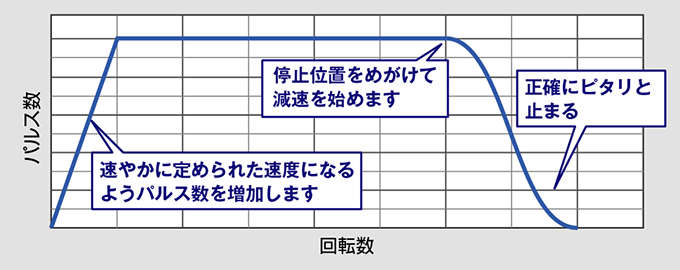
ピタリと止まる予測制御
サーボトップに使用している2相ステッピングモータは、回転角の基本ステップは1.8度となっています。これは200パルスで1回転する計算になります。このステッピングモータに供給されるパルスはマイクロプロセッサにより制御されます。そして位置決めの制御アルゴリズムにはアクチュエータが目標とする位置(角度)で正確に停止するように予測制御方式が取り入れられています。
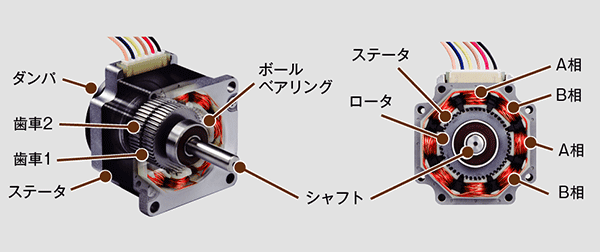
ステッピングモータの構造
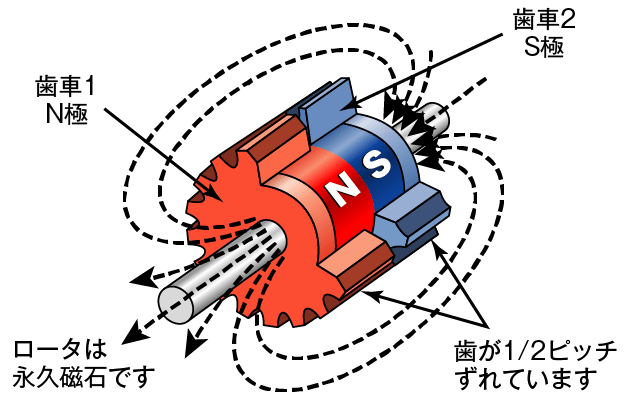
ステッピングモータの断面図を右図に示します。ステッピングモータは大きく分けてステータ(固定子)とロータ(回転子)の2つの部品から構成されています。ロータは軸方向に磁化された強力な永久磁石でできています。ステータはA相、B相からなる2つの巻き線を使った8個の電磁石がロータを取り囲む構造となっており、この電磁石の磁力を回転させることでロータを回転させています。モータシャフトには、ダンパと呼ばれる円盤状のパーツが取り付けられており、これにより高回転でのトルク特性を向上させています。
ステッピングモータが高精度なわけ
分解能 1/1000
ロータのN極とS極の歯車は、お互いの歯が歯のピッチの半分ずれた状態で組み合わされています。 すなわちN極の歯の谷の部分にS極の歯の山の部分が重なる構造になります。ステータは電磁石でこのロータを回転させますが、N極とS極の歯車を交互に吸引しながら1パルス入るごとに1/4ピッチ進みます(右図参照)。
サーボトップのモータの歯車には50個の歯があるので、1/4ピッチ進むごとに1.8度回転し200パルスで1回転します。このようにして高い分解能と機械精度を実現しています。全スパン回すのにモータ軸が100回転以上回るので、計算上1/20000以上*3 の分解能が得られていることになります。
*3. 仕様上、開度検出センサの精度や減速機構のバックラッシュなどを含めた最終的な 分解能は1/1000としています。
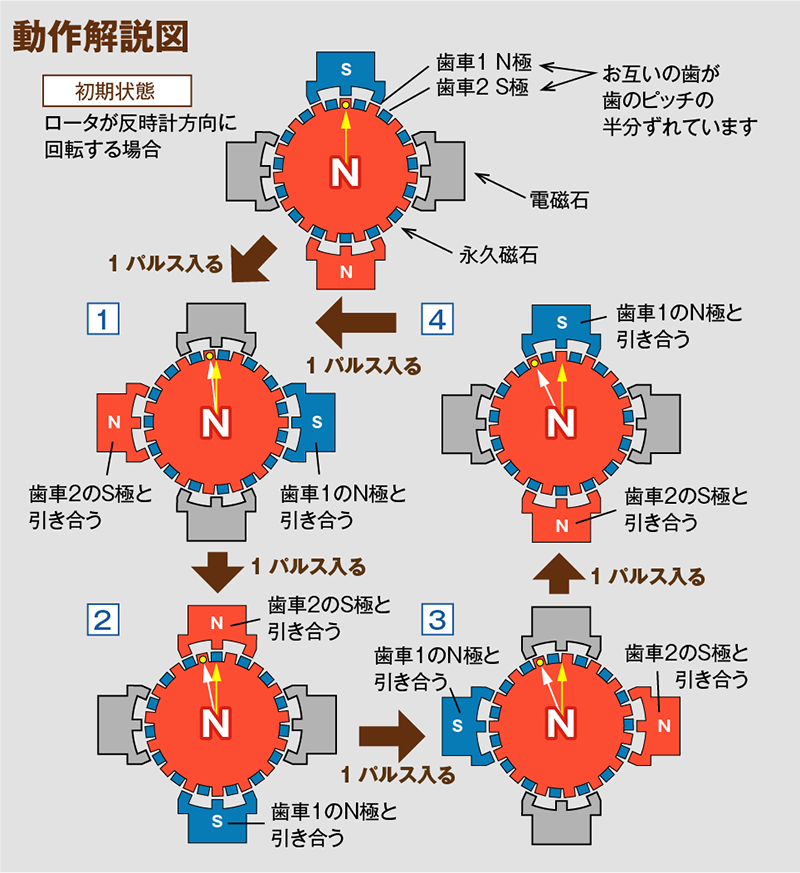
・実際のロータには歯が50個ありますが、わかりやすくするため解説図のロータの歯は15個に簡略化しています。