|
トップページ >PID制御のお話 第4回 |
||||||||||||
| 2004年5月号 | ||||||||||||
PID制御のお話
|
||||||||||||
| ワイド制御技術研究所 所長 広 井 和 男 |
||||||||||||
今回からいよいよPID制御がどのようにして生まれ、なぜ現在使用されている実用形態になったかという基本的流れを解説する本論に入っていきます。
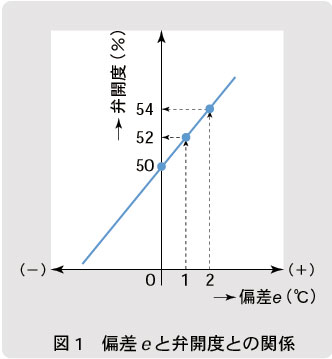
具体的には、手動制御の場合に「人間が行う比較・判断・操作の内容をそのまま数式化したもの」を調節計にやらせるのが自然な流れと見ることができます。 この連載で、例として取り上げている加熱炉出口温度を手動制御する場合に、人間がどのように制御するのかを追ってみると、次のような手順になります。 手順1:加熱炉内を所定の原料が流れている状態で、燃料流量調節弁の開度を増減させて出口温度測定値を目標値に一致させ、偏差をゼロにします。 手順2:この偏差ゼロ状態を基準にして、原料流量変化や目標値変化によって、偏差が1℃出たらこれをゼロにするために操作信号を何%変化させればよいかを決めます。そして、そのルールに従って以降の手動制御を行います。たとえば、偏差1℃当たり2%の割合で調節弁開度を調整すればよい場合の偏差 e と弁開度との関係は図1に示すようになります。これは、偏差 e の大きさに比例して調節弁開度を増減することを意味します。
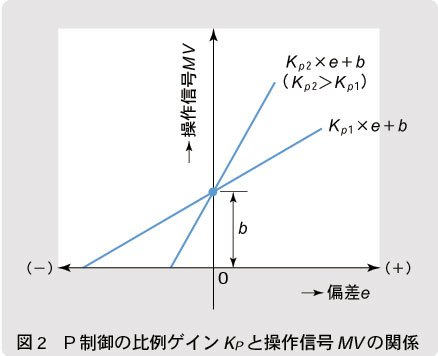
MV = KP × e + b …(1) MV :操作信号 (Manipulative variable) KP :比例ゲイン (Proportional gain) e :偏差(Deviation) (=目標値-制御量:Error) b :バイアス (1)式の比例ゲイン KP をパラメータとし、偏差 e と操作信号 MV との関係を図2に示します。バイアス b は偏差 e がゼロのときの操作信号の大きさ、つまり制御の起点を与えるもので、その後の操作信号 MV は偏差 e の大きさに比例して増減することになります。比例ゲイン KP を大きくしていくと、操作信号 MV は偏差 e の変化に対して急勾配で増減するようになります。 (1)式に示すように偏差 e の大きさに比例して、修正動作を行う制御方式をP(Proportional:比例)制御と呼んでいます。
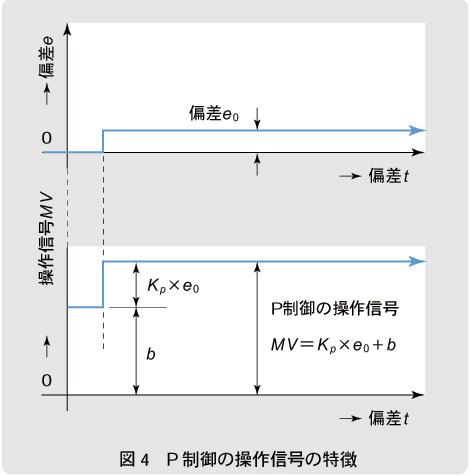
ステップ 偏差 e 0 を与えたとき、操作信号MVはどのようになるかを図4に示します。P制御の場合の特徴は操作信号 MV が偏差 e の大きさに比例して増減し、偏差 e が一定のときには、操作信号 MV は一定になることです。
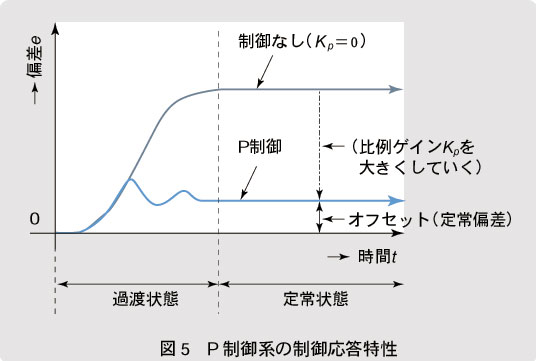
ここで少し定常偏差を定量的に追ってみましょう。式の導出は省略しますが、目標値だけをステップ状にaだけ変化させたときの定常偏差 eV の大きさは(2)式で表されます。 eV =a /(1+ KP ・K ) …(2) KP :比例ゲイン K :制御対象のゲイン この(2)式で、比例ゲイン KP を大きくしていくと、定常偏差eVはゼロに近づいていきます。しかし実際には KP を大きくし過ぎると、制御系のループゲインが過大になり、制御系が振動して、不安定になるため、比例ゲイン KP の大きさには限界があり、どうしても定常偏差が発生してしまいます。また(2)式によれば、制御対象のゲイン K が変化した場合にも、定常偏差の大きさは影響を受けることが分かります。 このP制御で、定常偏差が生じる理由については、次回に詳しく説明します。■ |
|
|||||||||||
|
||||||||||||