制御
エムエスツデー 1999年4月号

PID調節計の採用条件
「PID調節計で大丈夫だろうか?」 私たちが計装設備のエンジニアリングを行う際、応答遅れが大きいプロセスの制御方式を検討する段階で、時々このような問題に直面することがあります。今回は、その場合の簡単な判定方法の1つをご紹介します。
難しい要素、無駄時間
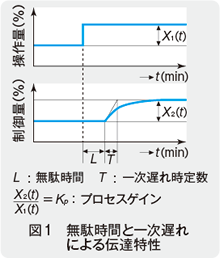
一口に応答遅れが大きいといっても様々なケースがあります。ここでいう応答遅れとは、制御系(センサ、変換器、調節計、調節弁等すべてを含む一巡閉ループ系)において、操作変数(=操作量)と制御対象となる変数(=制御量)との間の伝達特性を意味するものとします。この特性は、多くの場合、無駄時間要素と一次遅れや多次遅れ要素との組合せで表現されます。たとえば、無駄時間と一次遅れの組合せによる伝達特性は図1に示すようになります。さて、PID調節計によりフィードバック制御を行う場合、難しい要素となるのは図1における無駄時間要素なのです。無駄時間とは、その名のとおり、操作を行っても何ら応答がない時間帯(DEAD BAND)を意味し、すべてのプロセスには多かれ少なかれ無駄時間が存在します。
PID調節計の適用
それでは、無駄時間が大きいプロセスでは、それだけ制御が難しいかというと、必ずしもそうとはいえません。PID制御の難易度は無駄時間要素の絶対値ではなく、他要素との相対的な比率で決まります。その簡便な判定基準は以下のとおりです。
プロセスの伝達特性を、図1に示すような無駄時間要素と一次遅れで近似した場合、無駄時間の値 L を一次遅れ時定数 T で割った値、すなわち L / T がおおよそ0.5以下であれば、PID調節計によっておおむね良好な制御結果が得られます。この値が1を超えると制御性が悪くなり、2はPID制御ができるほぼ限界です。
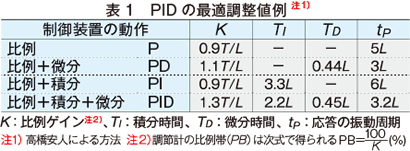
これらの判定の基になる図1の特性を得るのは決して難しいことではなく、実際のプロセスで、制御量と操作量を記録計にとっておき、出力をわずかにステップ状に変化させたときの記録から、作図によって大まかな値を知ることができます。また、この値が得られれば、PID定数のチューニングの際にも有効な値として用いることができます。プロセスゲイン、無駄時間、および時定数の値から、PID定数の最適調整値を知る方法を表1に示します。
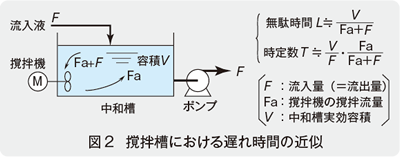
複雑なプロセスの設計段階で、これらの特性を正確に把握することは困難ですが、流量制御系では無駄時間はほとんどが流体の移送遅れと操作端のヒステリシスによるものであり、また、温度制御系では時定数が支配的な場合が多いため、事前に大まかな予測(PID制御で大丈夫かどうか)は知ることができます。なお、pH制御など成分制御系の場合は、無駄時間要素が支配的なプロセスであることが多く、一般に事前予測が困難ですが、参考のために、液体の撹拌槽における無駄時間と時定数の近似算出方法の例を図2に示します。
ご注意:当サイト「計装豆知識」は掲載誌発行当時の記事をそのまま再編集しておりますので、内容の一部(規格、価格、製品仕様など)が、その後変更されている場合があります。最新の情報や掲載記事に関するご質問は下記ホットラインまでお問合せください。

![]()