制御
エムエスツデー 1997年3月号

デジタル調節計の処理周期に注意
シーケンサ業界では、処理周期(スキャン周期)を短くする競争が盛んです。電磁リレーを使った並列回路をマイコンによる直列処理に置き換えているシーケンサでは、処理周期が短いほど並列処理に近づけることができるからです。一方、デジタル式PID調節計については、あまり処理周期を短くすると、I(積分)動作とD(微分)動作がうまく働かなくなります。これはマイコンを使用したデジタル調節計の動作原理に関係して発生する問題です。
デジタル式PID調節計の演算処理
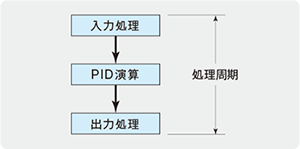
デジタル式PID調節計の測定値は、入力処理部でA/D変換され、デジタル値に変えられた後、PID演算を行います。演算結果(制御出力値)は、出力処理部でD/A変換され、統一信号4~20mA DCとして出力されます。
I 動作のデジタル演算
I 動作では、設定値と測定値の差(偏差)に積分係数を乗じ、その結果を制御出力に加算します。
I 動作の制御出力補正量 = 偏差 × 積分係数
積分係数は、積分時間と処理周期から決まります。積分時間の設定範囲には、最大と最小で約1万倍の差があります。また、積分係数は処理周期によって異なり、周期が0.1秒の場合は1秒の場合の10分の1になります。
この状態で「偏差が小さく、積分時間が長く(すなわち積分係数が小さく)、処理周期が短い」場合には、I動作の制御出力補正量が、デジタル演算値の最小単位(通常は 0.01%)以下になるため、ゼロと見なされる恐れがあります。このようなときには、処理周期を長くすれば正しい演算が実行できます。
D 動作のデジタル演算
D 動作の演算では、測定値の単位時間当たりの変化率を求め、変化率に微分係数を乗じた結果を制御出力に加算します。時間当たりの変化率は、前回の処理周期における測定値と今回の処理周期における測定値の差(差分)から求めます。
D 動作の制御出力補正量 = 変化率 × 微分係数
微分係数は、微分時間と処理周期から決まります。微分時間の設定範囲には、最大と最小で約千倍の差があります。処理周期を短くすると、測定値の変化速度が同じでも、差分(変化率)が小さくなります。
この状態で「差分が小さく、微分時間が短く(すなわち微分係数が小さく)、処理周期が短い」場合には、D 動作の制御出力補正量がデジタル演算値の最小単位以下になるため、ゼロと見なされる恐れがあります。この場合も、PID計器ブロックの処理周期を長く設定することにより対応できます。
処理周期の標準値
20年以上の歴史を持つ大形DCSの処理周期は「1秒」です。これより短い処理周期は例外的に採用されています。このような実績を参考にして、処理周期を不必要に短く設定しないことをおすすめします。
エム・システム技研のMsysNetシステムによるスーパーDCSは、基本処理周期を0.1~1秒の間で設定でき、さらに、ループ単位の処理周期については基本処理周期の64倍まで長くすることができます。
ご注意:当サイト「計装豆知識」は掲載誌発行当時の記事をそのまま再編集しておりますので、内容の一部(規格、価格、製品仕様など)が、その後変更されている場合があります。最新の情報や掲載記事に関するご質問は下記ホットラインまでお問合せください。

![]()