Final Control Components
A proposal for mechatronics conversion of the final control elements.
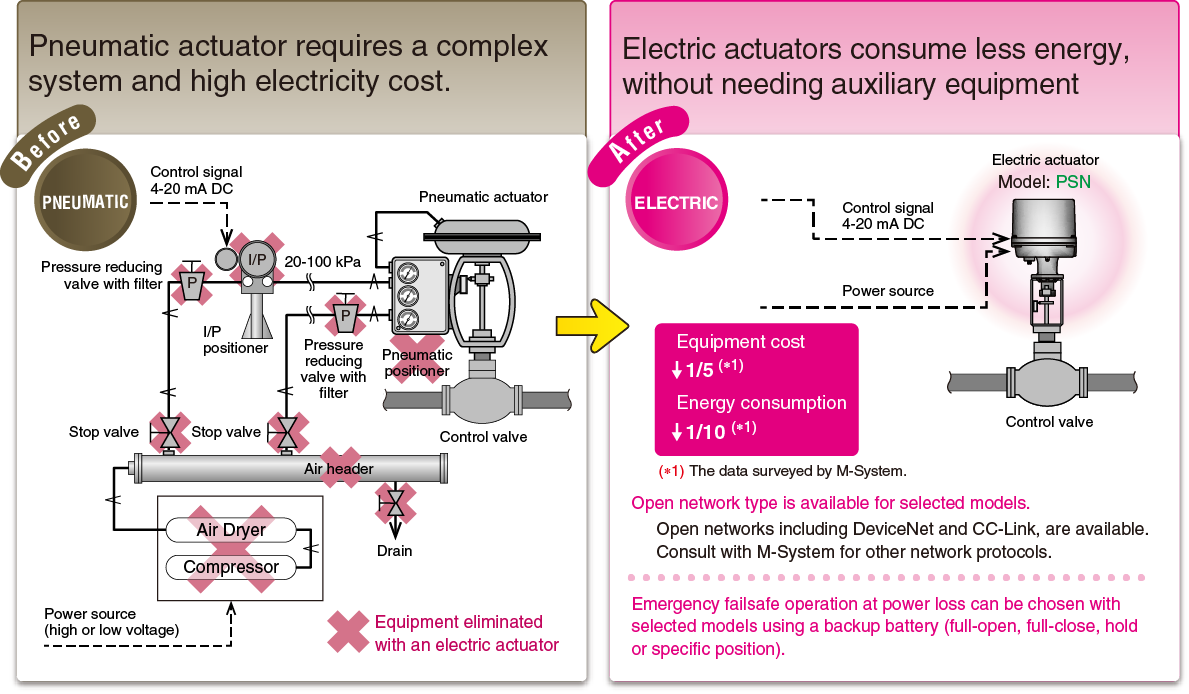
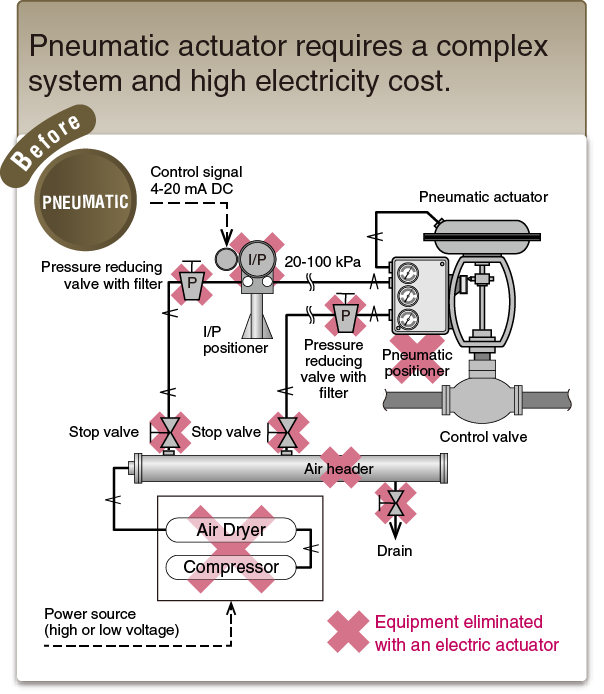
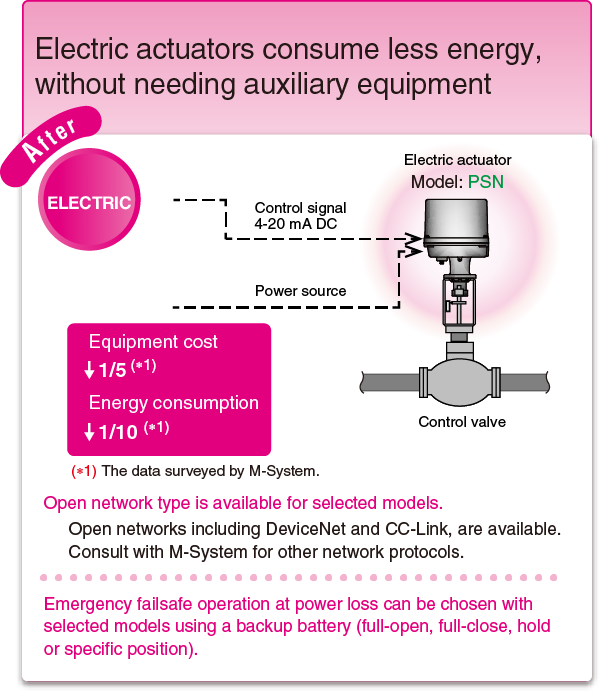
Benefits and Features of Electric Actuators
A Simple, Life-cycle Cost Saving Solution.
Mechanism that achieves high precision and high resolution control
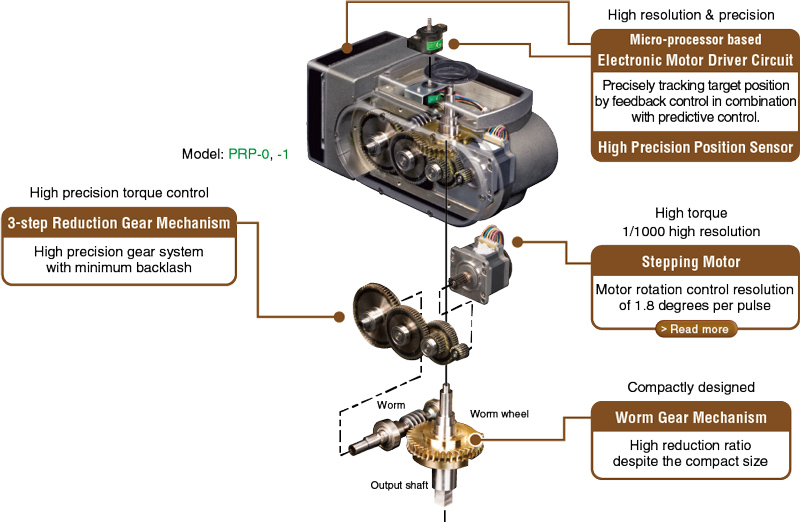
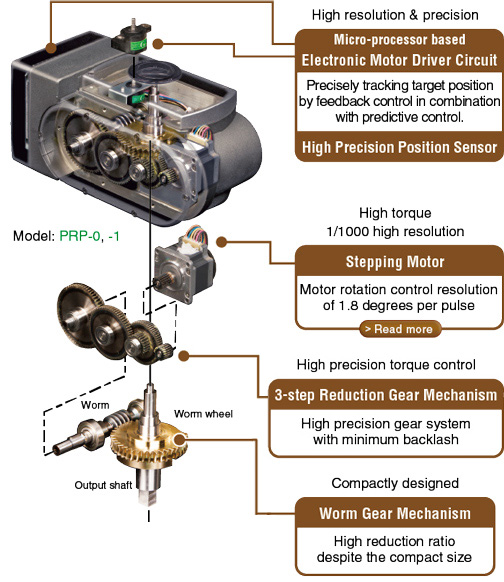
Features of Stepping Motor
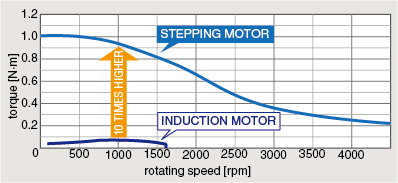
Comparing to an induction motor
A stepping motor has the following advantages compared to an induction motor.
It is most suitable as an actuating drive for small mechanisms including control valves.
- High torque for small size
(approx. 10 times greater than an induction motor of the same mass) - High torque at startup; with little torque variation during acceleration
- Variable rotating speed
- Rotating speed unaffected by load changes
- High precision positioning by acceleration/deceleration control
- Unaffected by voltage or frequency variations by the power source
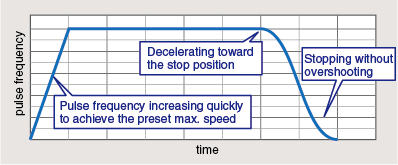
Predictive control enabling the motor to stop without overshooting
Basic rotating step per pulse of the two-phase stepping motor employed by the electric actuators is 1.8 degrees, thus requiring 200 pulses to complete a full 360-degree rotation.
The exact number of pulses is controlled by a micro-processor.
The “Predictive Control” employed as a part of its control algorithm enables the actuator to smoothly stop at an exact position (angle) without overshooting.
Features of Stepping Motor
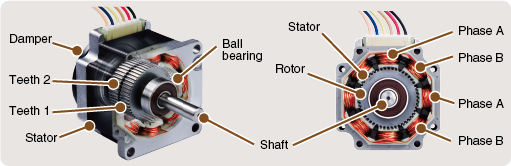
The below illustrations show cross section images of a stepping motor, called also “stepper motor” or “step motor.”
The stepping motor consists of two major components: a stator (stationary part) and a rotor (rotating part).
The rotor is a permanent magnetic rotating shaft, surrounded by eight electromagnets or coils of two phases (A and B).
Each electromagnet is energized in turn, attracting and repulsing the rotor to rotate its shaft.
The motor shaft is connected to a damper that enhances the torque characteristics of the motor at high speed.
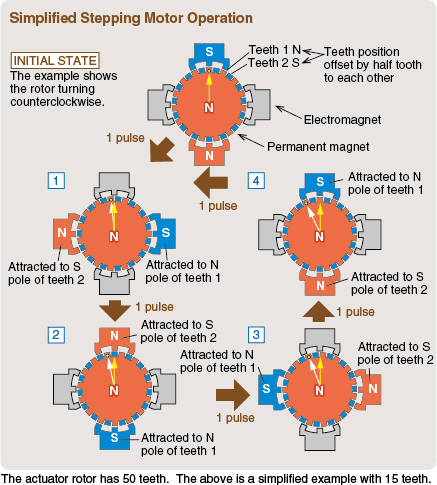
How Stepping Motor Works
1/1000 Resolution
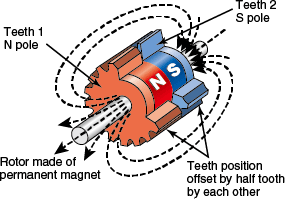
The N pole and S pole toothed gears are engaged with an offset of half tooth. The bottom of a N pole tooth is aligned with the top of a S pole tooth.
Each pulse moves the shaft by a quarter (1/4) tooth pitch while the N pole teeth and the S pole teeth are attracted and repulsed in turn. Each of those rotations is called a “step”.
The motor has 50 teeth around the wheel, turning 1.8 degrees per step, requiring 200 pulses to make a complete rotation with an integer number of steps. In this way the motor can be turned by a precise mechanical angle in high resolution.
The motor shaft rotates more than 100 times while the actuator travels the entire stroke/span. The calculated resolution is greater than 1/20000*2.
*2. The nominal resolution described in the actuator data sheet is 1/1000, considering additional influencing factors such as the accuracy of the position detecting sensor, backlash of the reducing gear mechanism.