PID定数の調整(その2)
松山 裕
まつやま ゆたか
松山技術コンサルタント事務所 所長
まつやま ゆたか
松山技術コンサルタント事務所 所長
4.3 PID定数の最適調整
PID定数の最適調整法を最初に作って発表したのは、アメリカのZiegler(ジーグラー)氏とNichols(ニコルス)氏です。この2人は、世界で初めてPID調節計を開発したアメリカのTaylor社の社員でした。当時、PID調節計が有用であることはわかったのですが、PID定数をどう調整すればよいのかわからず皆困っていました。
そこで、同社の営業技術部にいたジーグラー氏は、技術開発部にいたニコルス氏を誘って研究を行いました。当時の調節計は空気式でしたが、これを改造してむだ時間特性をもつプロセスモデルを作り、これにPID調節計を接続し、PID定数をいろいろ変えて測定値の変化を調べました。彼らが採用した最適調整のガイドラインは、減衰比1/4でした。その結果は、1942年のアメリカ機械学会の論文集に発表されて有名になり、その後全世界に拡がったのです。
その後、最適調整法については、世界各地で多くの研究や提案が行われました。代表的なものを表4.1に示します。
表4.1に示したChien、Hrones、Reswick3氏の方法では、目標値変更への対応と外乱対応に分け、さらにそのおのおのを行きすぎなしと行きすぎ量20%に分け、4通りの場合について最適調整のPID定数を与えています。これはアナログコンピュータによる実験データから得たもので、表の値はL/Tが0.125~1の間で成立するとしています。
表4.1のLとTは前回説明したステップ応答法(図4.2)によるものです。しかし、応答が遅いプロセスやノイズが多いプロセスでは、最終値がどこに落ち着くかわからない場合があります。その場合は、図4.6に示す応答速度Rを測定し、表4.1におけるKP・L/Tの代わりにRL/XまたはY0/Xを使用することもあります(注)。この場合、Xにおける%、Y0、Rにおける%は、それぞれ出力スパン、測定スパンに対するものです。
4.4 トライアンドエラーによるPID定数の調整法
前述の最適調整法は、これだけでいつでもよい結果が出るとは限りません。制御プロセスの特性はいわば千差万別ですが、これを等価時定数Tと等価むだ時間Lのわずか2つの特性値に集約しているので、あまり良い制御状態にならない場合もあり得ます。また仮に一度はうまく行っても、プロセスの特性が変わることもあります。したがってときどきは制御結果を見て、再調整することも必要です。
ここでは、トライアンドエラーによってPID定数値を調整する手順を説明します。
(a)最初は調節計を比例動作のみとしてスタートし、比例帯→積分時間→微分時間の順で調整します。
(b)各定数は、動作として弱い方から強い方へと少しずつ変えて行きます。
(c)各定数を変更したら、目標値を階段状に変えてみて測定値の変化の様子を見ます。その結果により、 さらにその定数を変えるかそ
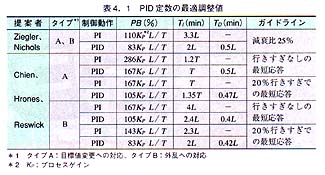
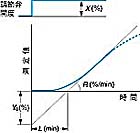
図4.6
プロセス特性の求め方
(応答速度法)