通信/ネットワーク
- IPv6/2002.11
- IPアドレス/2005.7
- RS-232/485規格/1999.9
- イーサネット/1999.10
- EtherNet/IP、EtherCAT/2011.7
- Ethernetケーブルとハブ(HUB)/2002.6
- 一般電話回線/2002.5
- インターネットとイントラネット(1)/2001.12
- インターネットとイントラネット(2)/2002.1
- ADSL/2002.10
- SLMPについて/2001.1
- FL-net(OPCN-2)/2005.8
- HDMI製品の開発プロセスについて/2020.4
- HLS(Hi-speedLink System)/2010.10
- OPC(OLE for Process Control)/1997.10
- 画像データの圧縮技術/1999.8
- 920MHz帯無線通信について/2015.10
- 携帯電話とメール機能/2002.4
- CC-Link/2000.2
- CC-Link IE TSNについて/2020.10
- CC-Link Ver.2.0/2005.2
- セキュア通信について/2020.7
- 専用電話回線と避雷器(1)/2008.9
- 専用電話回線と避雷器(2)/2008.10
- 全二重通信方式と半二重通信方式/1996.2
- ダイヤルアップルータとブロードバンドルータ/2003.3
- 通信ケーブルのシールド線の配線処理/2012.1
- TCPとUDP/2002.2
- データ伝送速度の単位“bps”と“ボー”/1993.11
- デジタル簡易無線/2015.7
- テレメータ装置と専用電話回線/2002.3
- DeviceNet/2000.1
- DNS(Domain Name System)/2006.10
- 特定小電力無線局/2003.11
- DoPa/2003.6
- ネットワークトポロジ/2002.8
- HART(ハート信号)(1)/1998.11
- HART(ハート信号)(2)/1998.12
- HART7(1)/2014.10
- HART7(2)/2015.1
- BACnet(1)/2007.8
- BACnet(2)/2007.9
- BACnet MS/TP/2018.7
- PoE(IEEE802.3af)/
2009.12 - FLEX NETWORK/2009.11
- フィールドバスの現状と問題/1996.12
- PROFIBUS(プロフィバス)/1999.12
- PROFIBUS-DPV1/2005.3
- PROFIBUS-PA/2005.6
- MECHATROLINK-II/2008.12
- MECHATROLINK-III/2009.3
- Modbus(モドバス)/1999.11
- USB/2003.9
- リアルタイムOS/2007.2
- LONWORKSについて/2001.11
- Wi-Fi(ワイファイ)/2013.7
- WirelessHART とISA100(その1)/2016.10
- WirelessHART とISA100(その2)/2017.1
エムエスツデー 2008年12月号

MECHATROLINK-II
1.MECHATROLINKの概要
オープンネットワークMECHATROLINKの推進団体としては、2003年に現在の前身組織であるMECHATROLINK MEMBERS CLUB(略称:MMC)が発足しました。2005年にはMECHATROLINKをよりオープン化することを目的としてMECHATROLINK協会(略称:MMA)がスタートし、現在に至ります。MMAの会員数は2008年9月現在302社、累積出荷ノード数は70万ノードに達しています。MECHATROLINK協会の幹事会メンバーは、横河電機、オムロン、デジタル、安川情報システム、安川電機から構成されています。
MECHATROLINKは1995年にオープン化されたモーション制御用フィールドバスです。開発当初の伝送速度は4Mbpsでしたが、その後モーションコマンドの整備とともに、伝送速度を10Mbpsに拡張し、現在はMECHATROLINK-IIに対応した製品が主流になっています。
MECHATROLINKはSEMI(Semiconductor Equipment and Materials International)規格のネットワークであり、E54.19(センサバス規格)として制定されています。
半導体・液晶製造装置で多くの採用実績があります。
2.MECHATROLINKのメリット
MECHATROLINK-IIのターゲットとする領域は、モーションを中心としたフィールドネットワークです。製造装置や生産ラインに使用されるマスタ機器とスレーブ機器をすべて1本のケーブルで接続することができます(図1)。
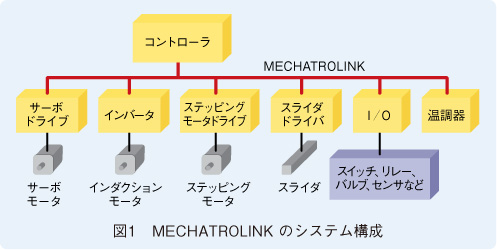
 MECAHTROLINKが接続できるスレーブ機器には、サーボドライブ、インバータ、ステッピングモータ、スライダ、I/O、温調器などがあります(図2にMECHATROLINK-IIに対応した製品例として、エム・システム技研のリモートI/O R7シリーズを示します)。従来、モーションネットとI/Oネットの2種類のネットワークを1つの装置の中に配線していた場合でも、MECHATROLINKを使用することで、1つの配線に統合することが可能になります。そうすることで、マスタCPU側におけるモジュールの削減や、配線ケーブルの種類の削減ができ、装置の組み立て工数や、コストを低減できます。
MECAHTROLINKが接続できるスレーブ機器には、サーボドライブ、インバータ、ステッピングモータ、スライダ、I/O、温調器などがあります(図2にMECHATROLINK-IIに対応した製品例として、エム・システム技研のリモートI/O R7シリーズを示します)。従来、モーションネットとI/Oネットの2種類のネットワークを1つの装置の中に配線していた場合でも、MECHATROLINKを使用することで、1つの配線に統合することが可能になります。そうすることで、マスタCPU側におけるモジュールの削減や、配線ケーブルの種類の削減ができ、装置の組み立て工数や、コストを低減できます。
また、システムの変更にも容易に対応できるため、スレーブ機器の追加や変更も自由に行えます。
3.MECHATROLINK-IIの仕様
MECHATROLINK-IIの伝送仕様を説明します(表1)。
表1 MECHATROLINK-II 伝送仕様
| 機能仕様 | MECHATROLINK-II |
| 物 理 層 | MECHATROLINK-II |
| 通信方式 | マスタ・スレーブ方式 |
| 通信スピード | 10Mbps |
| 伝送周期 | 250μs~8ms |
| トポロジ | バス接続 |
| 伝送距離 | 50m(リピータ使用時:100m) |
| 最小局間距離 | 50cm |
| ケーブル | 2芯STP(専用ケーブル) |
| 最大接続局数 | マスタ:1 スレーブ:30 |
| 通信データ長 | 17byte/32byte |
| エラーコレクション | CRC/ASICによるリトライ |
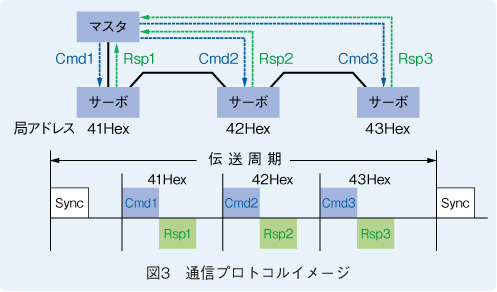
MECHATROLINK-IIのマスタからのコマンドと、スレーブからのレスポンスを交互に行うことで、確実な通信を行います。また、パケット内のCRC(Cyclic Redundancy Check:巡回冗長検査)をASICが監視し、異常があった場合にはASICが自動的にリトライ処理を行うので信頼性が非常に高い伝送路です(図3)。
MECHATROLINK協会:
〒358-8555 埼玉県入間市上藤沢480番地
TEL :04-2962-7920
e-mail :mma@mechatrolink.org
URL :www.mechatrolink.org
ご注意:当サイト「計装豆知識」は掲載誌発行当時の記事をそのまま再編集しておりますので、内容の一部(規格、価格、製品仕様など)が、その後変更されている場合があります。最新の情報や掲載記事に関するご質問は下記ホットラインまでお問合せください。

![]()